


Tabla de enlaces
Resumen e I. Introducción
II. Metodología
Iii. Resultados experimentales
IV. Conclusión y obras futuras, y referencias
Iii. Resultados experimentales
El sistema consiste en una IMU de grado de consumo montada en el talón del zapato (como se muestra en la Fig.3) con la velocidad de transmisión a 100 Hz a través del modo inalámbrico a la computadora portátil para registrar y visualización en tiempo actual. El IMU llamado MTW Awinda contiene acelerómetro MEMS de 3 ejes, giroscopio MEMS de 3 ejes y magnetómetro MEMS de 3 ejes. Los parámetros en detalle se pueden encontrar en el sitio net de XSens Firm. Se realizaron varios experimentos para acceder al rendimiento de la metodología propuesta.
A. Caminar en el campo de perturbaciones magnéticas duras
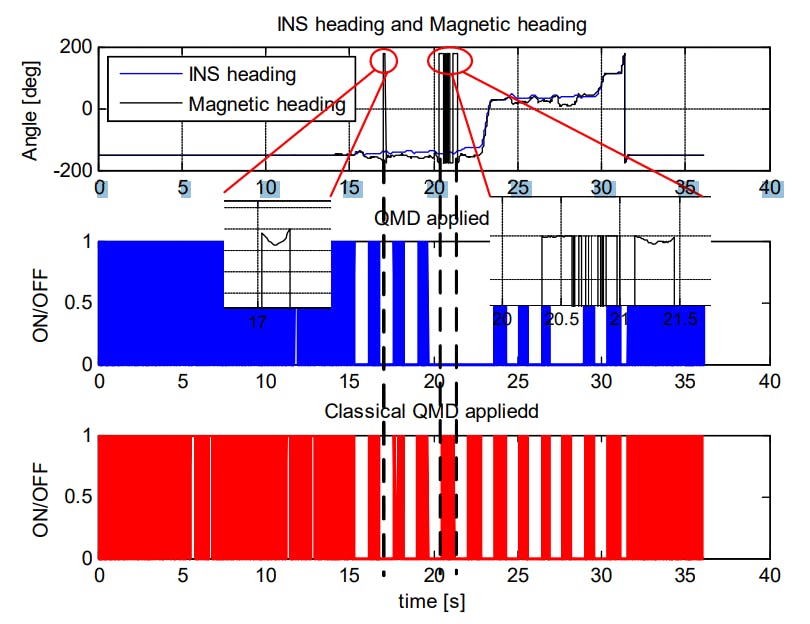
En este caso, un peatón camina a lo largo del corredor con el imán colocado en el piso como se muestra en la figura 5. Los círculos rojos en la Fig.6 indican que la perturbación magnética dura ocurre debido al rumbo magnético incorrecto, mientras que el encabezado del INS se mantiene estable. Debido a la característica del imán, la intensidad del campo magnético cerca es constante. En consecuencia, desde el dibujo zoom en la Fig.6, los encabezados magnéticos permanecen estables pero incorrectos. El algoritmo QMD propuesto contribuye a un resultado de detección correcta en comparación con el método QMD clásico y tiene un mejor rendimiento.



B. Caminar en un entorno inside actual
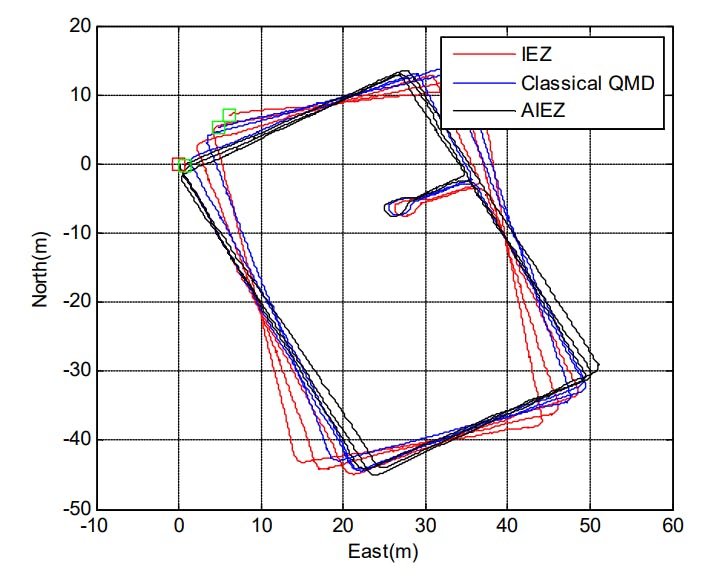
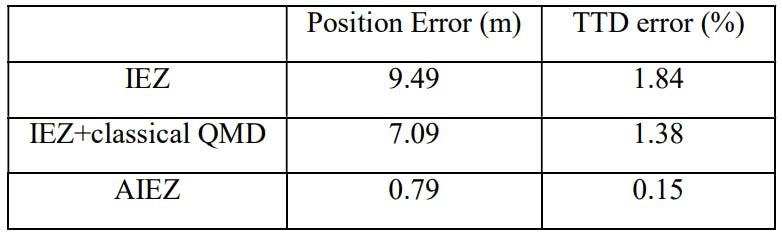
En este caso, caminamos a lo largo de la trayectoria common durante tres ciclos durante 7 minutos en el edificio de enseñanza 26 en la Universidad de Tianjin. La distancia whole de la primera trayectoria es de aproximadamente 515.5 metros. Evaluamos el rendimiento entre el QMD y AIEZ IEZ, IEZ+Classical (como se muestra en la Fig.7) y registramos el error whole de distancia recorrida (TTD) en la Tabla I.


IV. Conclusión y obras futuras
En este documento, se implementó QMD para combinar el algoritmo EC y el algoritmo HDR para lograr la complementación entre ellos. El algoritmo QMD clásico no reconoce el campo magnético duro y lo confunde con el campo magnético puro. Nuestro método QMD propuesto captura el momento en que la intensidad del campo magnético es estable y el encabezado magnético es comparable al encabezado de INS. Por lo tanto, tiene un mejor rendimiento que el QMD clásico. Aiez Framework fusiona el algoritmo EC y HDR y es superior a los marcos de QMD IEZ y IEZ+Classical. En el futuro, se deben resolver muchos experimentos para evaluar el rendimiento del detector de QMD y el marco Aiez.
Referencias
[1] Harle, Robert. “Una encuesta de sistemas de posicionamiento inercial inside para peatones”. IEEE Encuestas y tutoriales de comunicaciones 15.3 (2013): 1281-1293.
[2] Qian, Jiuchao, et al. “Un método mejorado de localización en interiores utilizando sensores de inercia de teléfonos inteligentes”. Posicionamiento inside y navegación en interiores (IPIN), Conferencia Internacional 2013 sobre. IEEE, 2013.
[3] Patarot, Alexandre, et al. “IMU montada en la correa con una estimación de distancia mejorada para el posicionamiento inside de peatones”. Posicionamiento inside y navegación en interiores (IPIN), Conferencia Internacional 2013 sobre. IEEE, 2013.
[4] Patarot, Alexandre, et al. “IMU montada en la correa con una estimación de distancia mejorada para el posicionamiento inside de peatones”. Posicionamiento inside y navegación en interiores (IPIN), Conferencia Internacional 2013 sobre. IEEE, 2013.
[5] Nilsson, John-Olof, et al. “Ins montados en el pie para todos, una implementación integrada de Openseurce”. Ubicación de posición y Simposio de navegación (Planes), 2012 IEEE/ION. IEEE, 2012.
[6] Jiménez, Antonio Ramón, et al. “Navegación peatonal inside utilizando un marco INS/EKF para la reducción de la deriva de guiñada y una IMU montada en el pie”. Posicionamiento de navegación y comunicación (WPNC), Séptimo Taller de 2010 en. IEEE, 2010.
[7] Fischer, Carl, Poorna Talkad Sukumar y Mike Hazas. “Tutorial: implementar un rastreador peatonal usando sensores inerciales”. IEEE Pervasive Computing 12.2 (2013): 17-27.
[8] Liu, Yu, et al. “Estimación de la longitud del paso basada en D-Zupt para el sistema de reducción de muertos peatones”. Electronics Letters 52.11 (2016): 923-924.
[9] Angermann, Michael, et al. “Caracterización del campo magnético inside para aplicaciones en localización y mapeo”. Posicionamiento inside y navegación en interiores (IPIN), Conferencia Internacional 2012 sobre. IEEE, 2012.
[10] Ladetto, Quentin y Bertrand Merminod. “Integración digital de brújula magnética e giroscopio para la navegación peatonal”. 9ª Conferencia Internacional sobre Sistemas de Navegación Integrados, Stpetersburg. 2002.
[11] Afzal, Muhammad Haris, Valérie Renaudin y Gérard Lachapelle. “Uso del campo magnético de la Tierra para mitigar los errores de giroscopio independientemente de la perturbación magnética”. Sensores 11.12 (2011): 11390-11414.
[12] Jiménez, Antonio R., et al. “Una comparación de los algoritmos de recipiente muerto peatonal usando una IMU MEMS de bajo costo”. Procesamiento de señales inteligentes, 2009. WISP 2009. Simposio internacional IEEE sobre. IEEE, 2009.
[13] Bebek, Özkan, et al. “Navegación private a través de unidades de medición de inercia de alta resolución correccionadas”. Transacciones IEEE sobre instrumentación y medición 59.11 (2010): 3018-3027.
[14] Skog, Isaac, et al. “Detección de velocidad cero: una evaluación de algoritmos”. Transacciones IEEE en Ingeniería Biomédica 57.11 (2010): 2657-2666.
[15] Norrdine, Abdelmoumen, Zakaria Kasmi y Jörg Blankenbach. “Detección de pasos para el sistema de navegación peatonal inercial asistido por ZUPT utilizando imán permanente montado en el pie”. IEEE Sensors Journal 16.17 (2016): 6766-6773.
[16] Kay, Steven M. Fundamentos del procesamiento de señales estadísticas. Prentice Corridor Ptr, 1993.
Autores:
(1) Liqiang Zhang, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China;
(2) Kai Guo, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China;
(3) Yu Liu, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China.
Este documento es













{kind=link}