


Autores:
(1) Liqiang Zhang, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China;
(2) Kai Guo, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China;
(3) Yu Liu, Escuela de Microelectrónica, Universidad de Tianjin Tianjin, China.
Tabla de enlaces
Resumen e I. Introducción
II. Metodología
Iii. Resultados experimentales
IV. Conclusión y obras futuras, y referencias
Abstracto—El Sistema de navegación de inercia basado en filtro de Kalman (INS) es un método confiable y eficiente para estimar la posición de un peatón en interiores. La metodología basada en INS clásica que se llama IEZ (INS-EKF-Zupt) hace uso de un filtro Kalman extendido (EKF), una actualización de velocidad cero (ZUPT) para calcular la posición y la actitud de una persona. Sin embargo, el error de encabezado, que es un issue clave de todo el sistema de cálculo muerto de peatones (PDR), no es observable para el sistema PDR basado en IEZ. Para minimizar el error, el algoritmo electrónico de brújula (EC) se convierte en un método válido. Pero la perturbación magnética puede tener un gran efecto negativo en ella. En este documento, se propone el método de detección de campo magnético cuasiestático (QMD) para detectar el campo magnético puro y luego selecciona el algoritmo EC o el algoritmo de reducción de deriva de encabezado heurístico (HDR) de acuerdo con el resultado de detección, lo que implementa la complementación de los dos métodos. Mientras tanto, los algoritmos QMD, EC y HDR se integran en el marco IEZ para formar una nueva solución PDR que se llama Avanzada IE (AIEZ).
I. Introducción
El Sistema World de Satélite de Navegación (GNSS) se usa ampliamente como un método de posicionamiento esencial para la navegación de peatones. Pero en el campo, como el cañón urbano o el entorno inside, GNSS se vuelve poco confiable debido a la atenuación de la señal, la interferencia y la sombra. Para obtener resultados de posicionamiento continuo y confiable, se está investigando el sistema de posicionamiento native (LPS) mediante el uso de varios tipos de métodos, como tecnología basada en la unidad de medición inercial (IMU), basada en la visión o la visión. [1]and so on. Entre ellos, se prefieren los métodos de PDR basados en IMUS debido a un menor costo, mayor confiabilidad, así como no se necesita infraestructura externa.
Se investigaron diferentes posiciones de montaje, incluida la computadora de mano [2]montado en el cinturón [3] o montado en el pie [4-8]and so on. Desafortunadamente, la IMU de bajo costo proporciona estabilidad a corto plazo y los errores sistemáticos aumentan debido a su naturaleza de integración. Para mejorar el rendimiento del sistema, un marco PDR de Kalman ampliamente utilizado IEZ [4] Algoritmo ZUPT utilizado para estimar errores de velocidad durante la fase de postura. También sugerimos un nuevo algoritmo de detección de fase de postura que se denomina twin zupt (d-zupt) para mejorar el rendimiento del sistema PDR [8].
Para el rendimiento del sistema PDR, el encabezado es uno de los factores más esenciales que tiene un impacto en su precisión. Sin embargo, el error de encabezado no es observable para IE. Utilizar el encabezado magnético es una forma efectiva de limitar el error de deriva del encabezado. Pero perturbaciones magnéticas que incluyen perturbaciones blandas y duras [9, 10] son estocásticos y cambiantes en el inside, que son imposibles de predecir. Por lo tanto, se propuso el algoritmo cuasiestático de detección de campo magnético (QMD) para seleccionar el campo magnético puro en el entorno de perturbación magnética y luego fusionar los datos del giroscopio y el magnetómetro [11]. El método está disponible para detectar el campo magnético que está cambiando ligeramente y tiene un buen rendimiento. Sin embargo, es difícil reconocer la perturbación magnética dura. No se puede negar que sigue siendo un método eficiente para mejorar la precisión del encabezado del sistema PDR.
En este artículo, el algoritmo QMD se rediseñó para resolver el problema de que la perturbación magnética dura es difícil de detectar para el algoritmo clásico de QMD en [11]. Cuando QMD detecta las perturbaciones, el algoritmo HDR que solo confía en los datos del giroscopio se selecciona para reducir el error de deriva del encabezado. Por el contrario, el algoritmo Digital Compass (EC) es una mejor opción para modificar el error de encabezado. Referido a [4]después del trabajo de Foxlin, para derivar un nuevo sistema PDR, el algoritmo QMD, HDR y EC se integran en IES para formar un marco novedoso llamado Aiez (Superior IEE).
II. Metdología
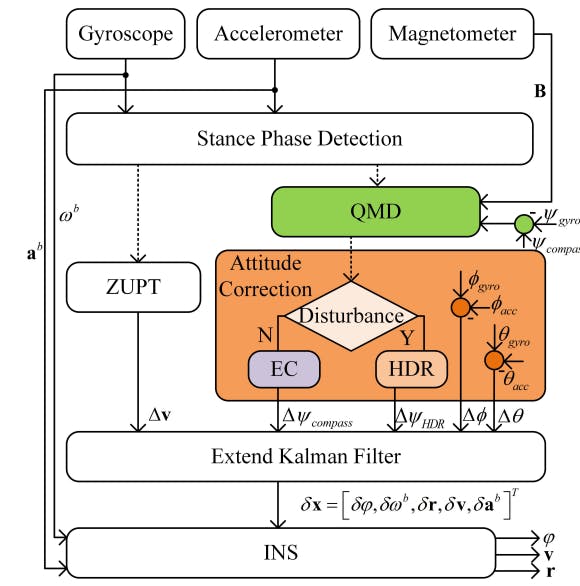
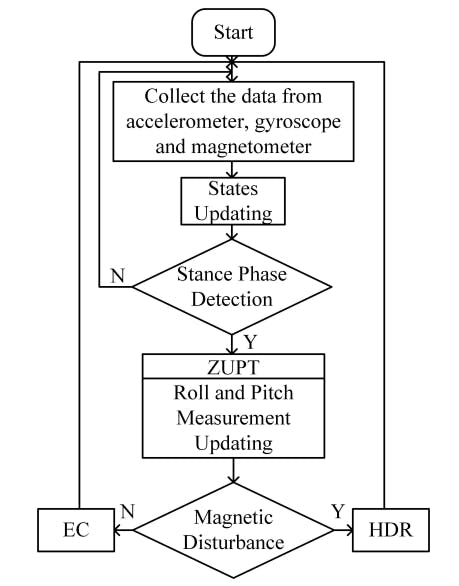
Esta sección describe el mecanismo del marco PDR Aiez. Los pasos de procesamiento se muestran de la siguiente manera. El diagrama de bloques de Aiez se muestra en la Fig.1, así como en el diagrama de flujo en la Fig.2.
-
Los datos recopilados del acelerómetro y el giroscopio se utilizan para detectar la fase de postura.
-
El rollo y el ángulo de tono se estiman utilizando los datos del acelerómetro durante la fase de postura.
-
Mientras tanto, cuando el campo magnético puro es detectado por QMD, la CE se selecciona para calcular el encabezado óptimo. Por el contrario, HDR es la mejor opción para corregir el error de deriva del encabezado.
-
El filtro Kalman extendido (EKF) se actualiza con la medición de la velocidad y la actitud mediante la corrección de actitud y la actitud (AC) durante la fase de postura, respectivamente.
-
Finalmente, obtenemos la actitud óptima, la velocidad y la posición utilizando el mecanismo de navegación inercial.


A. Sistema de navegación inercial montada en zapatos
Utilizamos el sistema de navegación inercial (INS) estándar para calcular la actitud, velocidad y posición del peatón para calcular el peatón. El IMU llamado MTW Awinda con el tamaño de 148 × 104 × 31.9 mm de XSens Firm está configurado para enviar datos a 100 Hz, que se monta en el talón como se muestra en la Fig.3.






B. Algoritmo de detección de fase de postura
La detección de fase de postura es un proceso clave en el marco PDR Aiez. Un mejor reconocimiento de la fase de postura contribuye a desencadenar el EKF oportunamente para modificar los errores INS para un mejor rendimiento. La mayoría de los algoritmos para la detección de fase de postura dependen de los datos del acelerómetro [12] o giroscopio [13] así como tanto acelerómetro como giroscopio [6, 14]. Algunos eruditos implementaron la detección utilizando ultrasonido, RFID o imán [15]and so on. Utilizamos el detector de detección óptima de hipótesis de la postura (zapato) propuesto en [14] para detectar la fase de postura.
C. Algoritmo de detección de campo magnético cuasiestático
Formalizamos el problema de detección de campo magnético cuasiestático como un problema de prueba de hipótesis binaria, donde el detector puede elegir entre las dos hipótesis que se definen de la siguiente manera:


Referido a [14]el modelo de salida del sensor se establece como:





D. Algoritmo de corrección complementaria
Debido a la influencia de los sesgos de acelerómetro y giroscopio, los errores del ángulo de Euler se acumulan con el tiempo. El uso de los datos del acelerómetro y el giroscopio puede calcular el rollo absoluto y el ángulo de tono cuando el pie está estacionario. El campo magnético puro contribuye a un verdadero encabezado. Utilizamos los datos durante la fase de postura para modificar la actitud calculada por INS.

2) Compass electrónica


3) Reducción de la deriva del encabezado heurístico


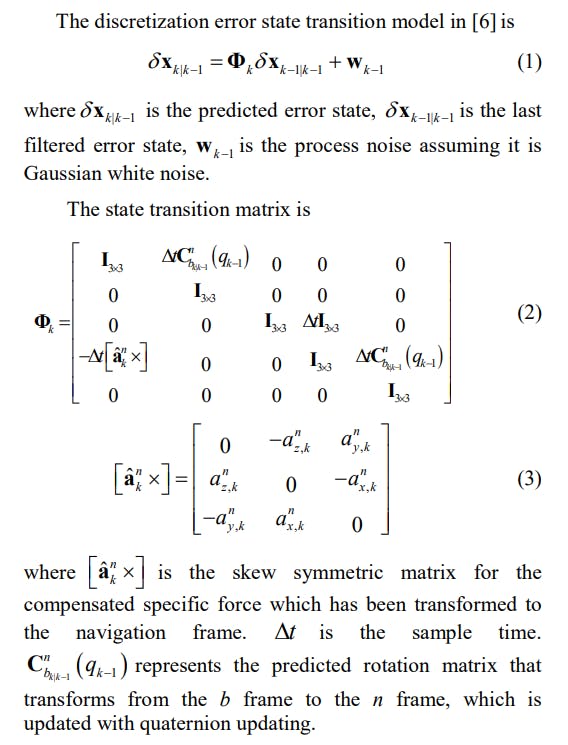
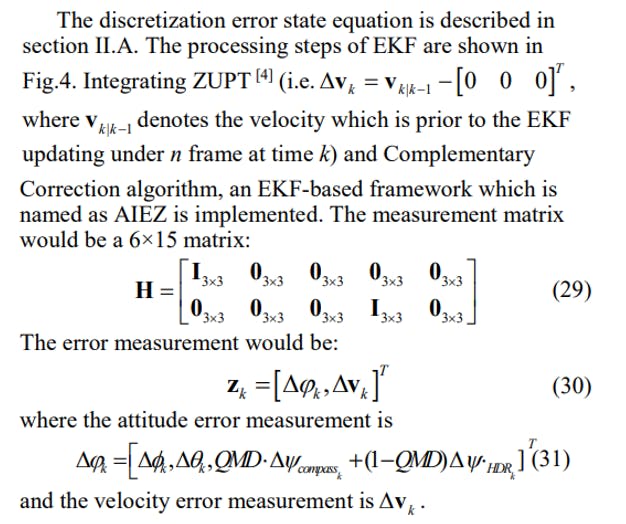
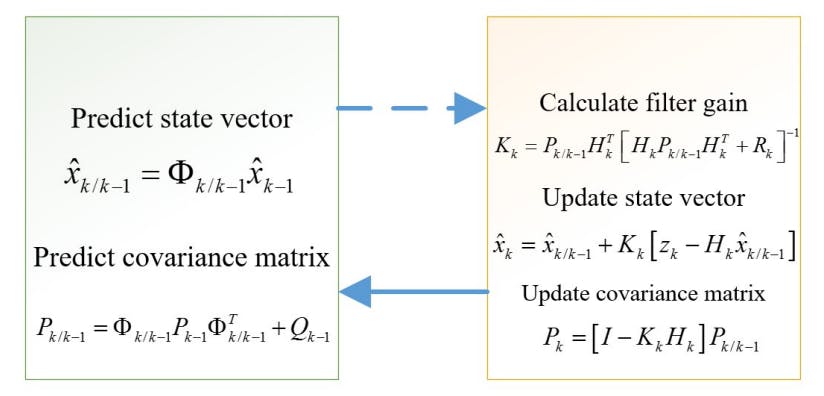
E. Extender el filtro Kalman



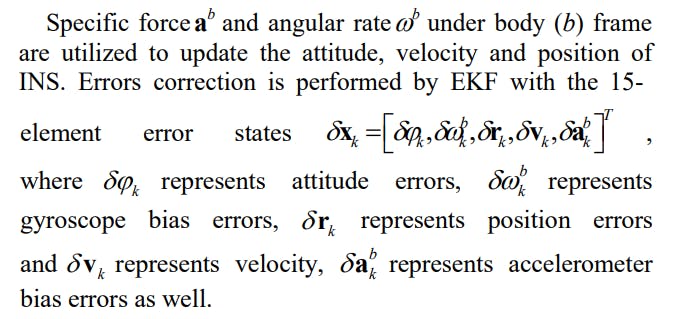
Este documento es












{kind=link}